For one of my final year course assignments in Advance Robotics in the University of Cambridge,, two friends and I decided to investigate the feasibility of using a relatively new type of artificial muscle
(super coiled polymers), to power prosthetics.
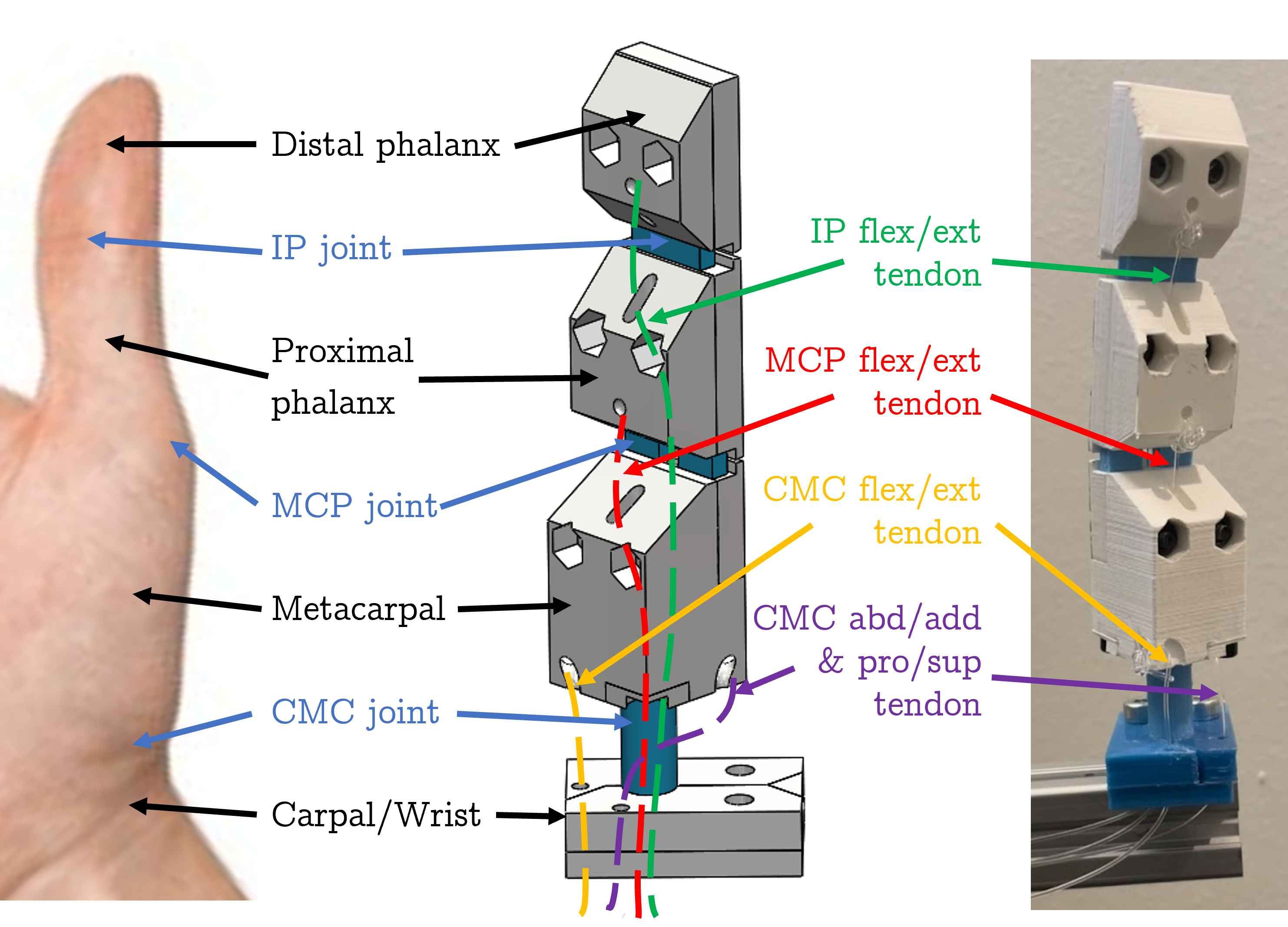
To achieve this we designed a 3D printable soft robotic thumb. The joints were cast in silicon allowing it to flex. We attached tendons to each “
bone” in the thumb to ensure that our thumb would have the same range of motion as a normal humans.
To evaluate our design, we had to assess how it performed in comparison to a human's thumb. We decided to focus on the enclosed volume the thumb could reach as our key metric. Finding the volume of the space the thumb could reach proved very challenging. I wrote a program which used two webcams and Machine Learning computer vision packages to track the end point of the robotic thumb. Due to the difference in position of the thumb in each webcam's view, I could calculate the 3D position of the thumb as it swept through the space in which it could move, and ultimately calculate the enclosed volume. This was a challenging project but made good fun by my excellent team mates.