This is the second ROV I’ve been working on (nicknamed Suki). Suki’s brains are a Raspberry Pi and an Arduino.
The Raspberry Pi hosts a webpage (built using flask) which is accessible via your browser when you plug in the ethernet cable that allows for the
communication between the user and the ROV. The webpage shows a live stream from the webcam mounted on Suki, it also allows you to steer the ROV
either by using your keyboard or by connecting an Xbox controller.
The Raspberry Pi passes the commands from the user to the arduino via classic serial communication. The arduino then executes the commands.
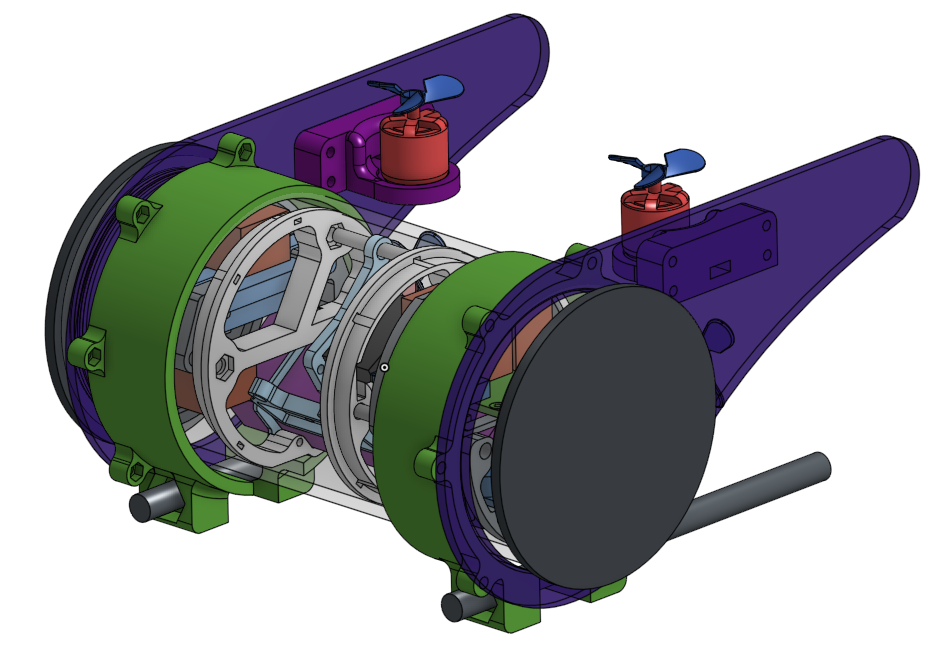
Brushless motors are used for thrusters, I’m interested to see how they fare in salt water! In theory they should work fine underwater but we will see.
A servo motor allows the webcam to be panned up and down.
All of what I’ve just explained has been built, what’s left is to lasercut the side pieces and end caps for the tube and water proof it. I’d also like to
work on a simple PID controller to keep the ROVs roll level during use, and maybe investigate using OpenCV to stabilise the live feed from the ROV by
compensating for changes in pitch by adjusting the webcam's pan angle.