This is the first ROV I ever built. I began working on it when I was 15. This project really started my
love of marine robotics and introduced me to the world of CAD, 3D printing, soldering and all the
other good stuff.
The idea for the ROV came about because my local harbour was extended and I wanted to see if there were any changes in the types of
fish visiting the harbour after the construction.
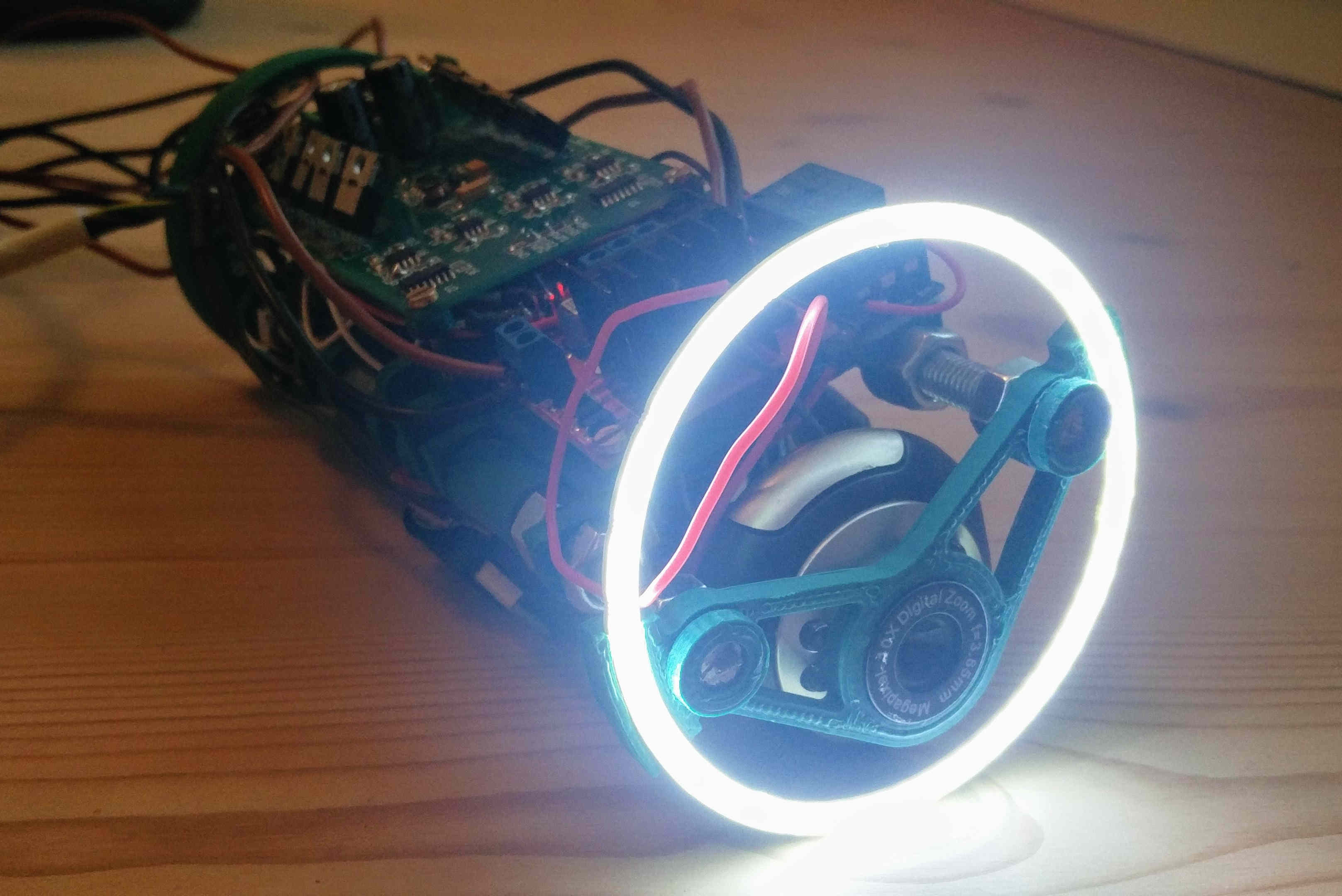
It was quite a simple design, disassembled bilge pumps were used as thrusters. They were controlled by an Arduino inside a PVC tube. I used a car headlight ring light for lighting which worked out great. The Arduino was connected to a 3D printed controller which sent commands to it over serial. This was reliable and worked well but because the webcam also needed its own tether, the tether ended up being quite big and heavy.