In summer ‘22 I worked in DTU Aqua (a department in the Technical University of
Denmark focused on marine research) as a research assistant.
I was tasked with compiling a report on all the different ways you can collect data from the
oceans around Greenland (in a fixed location).
It was a great task, I got to speak with researchers and industry specialists asking them about
how they had completed similar projects.
I got to write python scripts to analyse forces in moorings and expected drifts of different
concepts using historical current data.
While in this role, I came up with a new way to take these measurements. My idea was we could
use a type of ocean glider AUV to move up and
down the water column while staying in the same area, I called it the Virtually Anchored
Profiler (VAP). DTU Aqua thought the idea was
interesting, so I organised a collaboration between DTU and the University of Cambridge and
continued investigating this concept as my
Masters project.
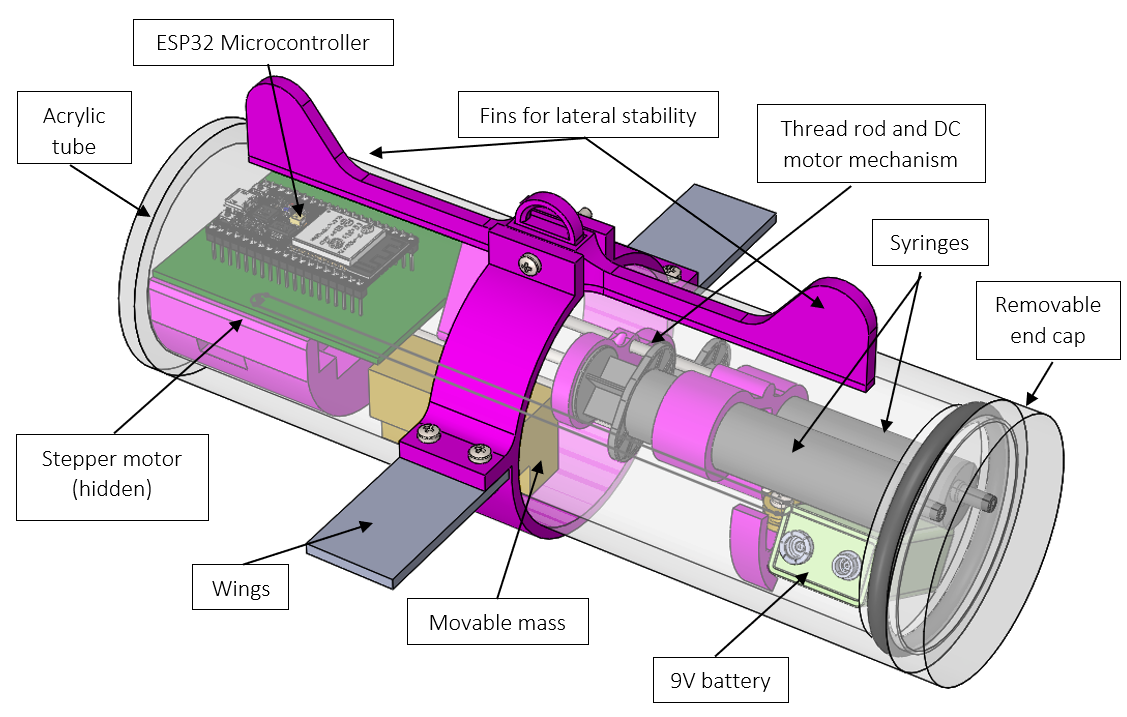
I decided to investigate how to control the VAP in an energy optimal way, while ensuring that
the VAP moves where it needs to. To do this I
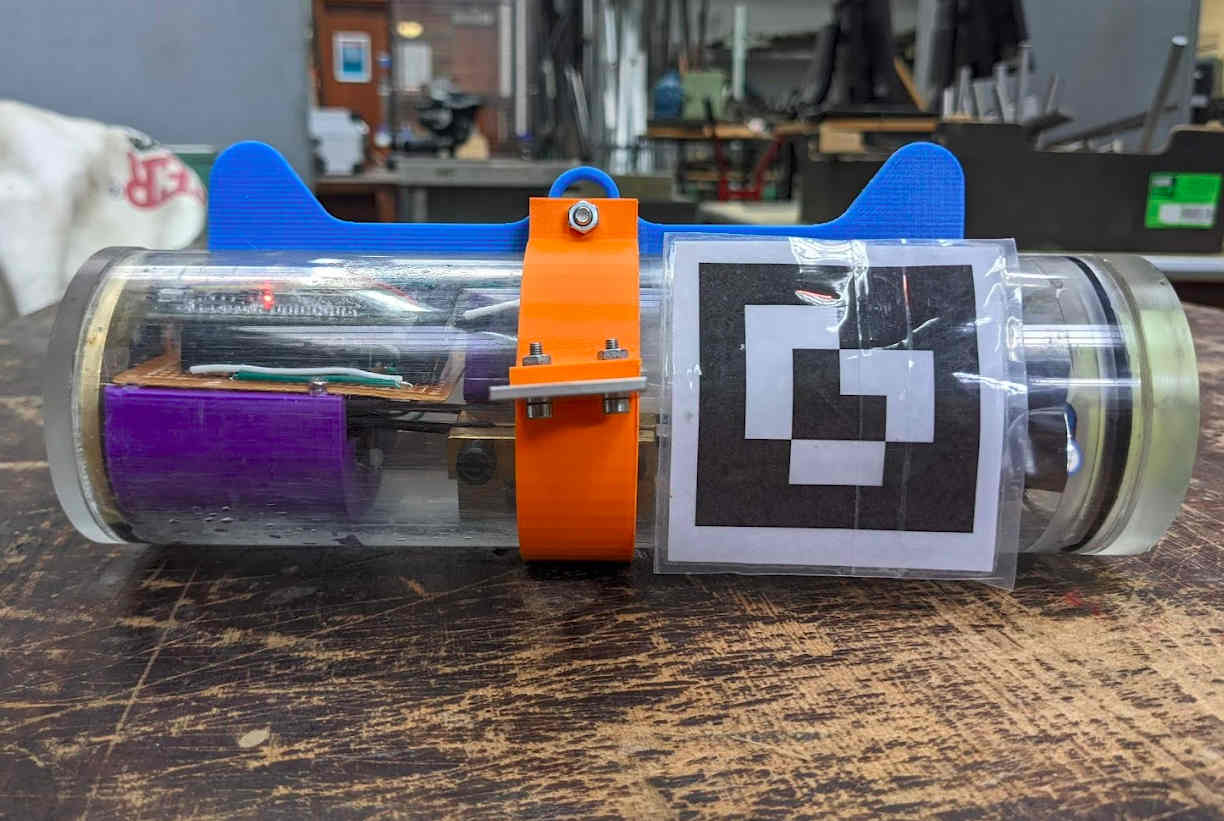
first built a prototype VAP, which had a movable brass mass (so the centre of mass could be
changed) and motorised syringes (so the buoyancy
could be changed). An ESP 32 controlled the device.
I wrote a Python program which allowed me to choose a control strategy. It computed the path the VAP should follow based on that control strategy. It tracked the position of the VAP using a webcam connected to the laptop pointed at the tank of water (this was quite involved, I had to undistort the image and define a space using these fiducial marker tags, for anyone looking to do something similar I highly recommend using fiducial markers, I used April tags).
This program also calculated how the position of the centre of mass of the VAP and its buoyancy
should be varied to follow the path. The error and
amount of energy expended was calculated for each control strategy which allowed me to compare
them.
My project was awarded a First Class Honours and was nominated by the Department of Engineering
for the Institute of Mechanical Engineers best
project prize.